Context
Coming into this project I had little tangible robotics work experience, but nonetheless for the longest time I have been interested in bringing a modular robotic arm to the industrial space. When embarking on my capstone project that was exactly the plan, but after consultation with experts and advisors my group decided to make a modular robotic arm for an educational setting.
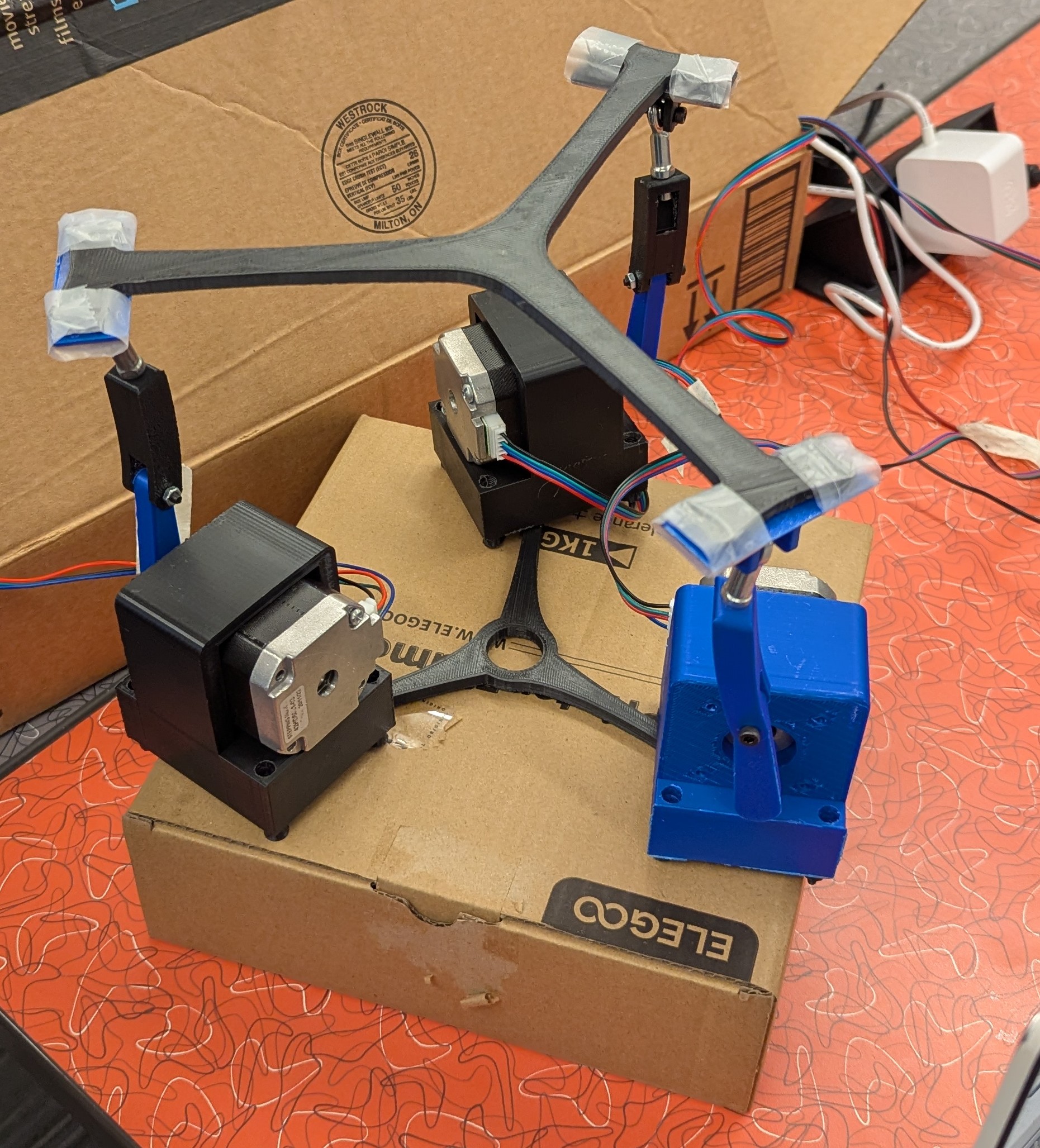
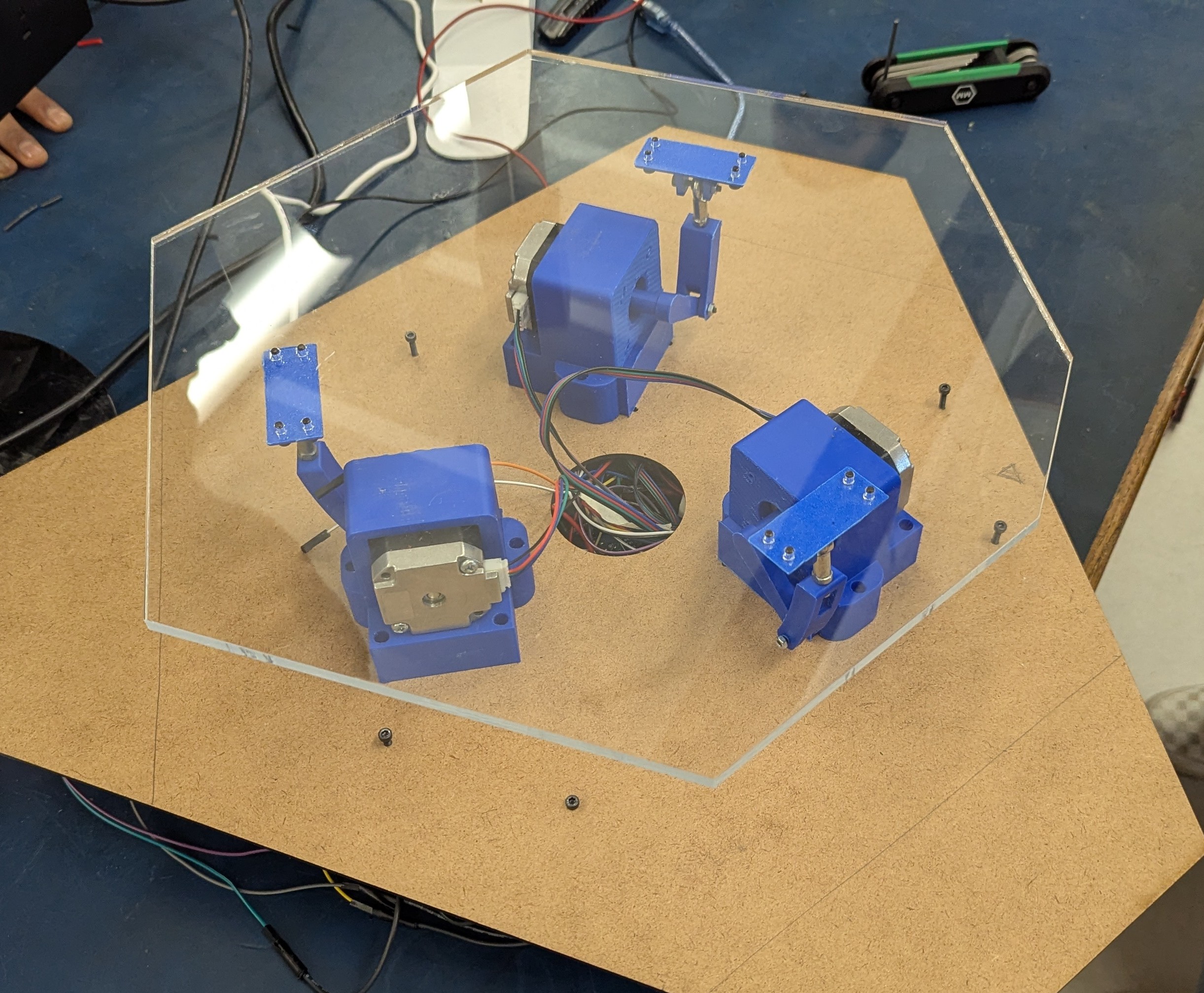
The Goal
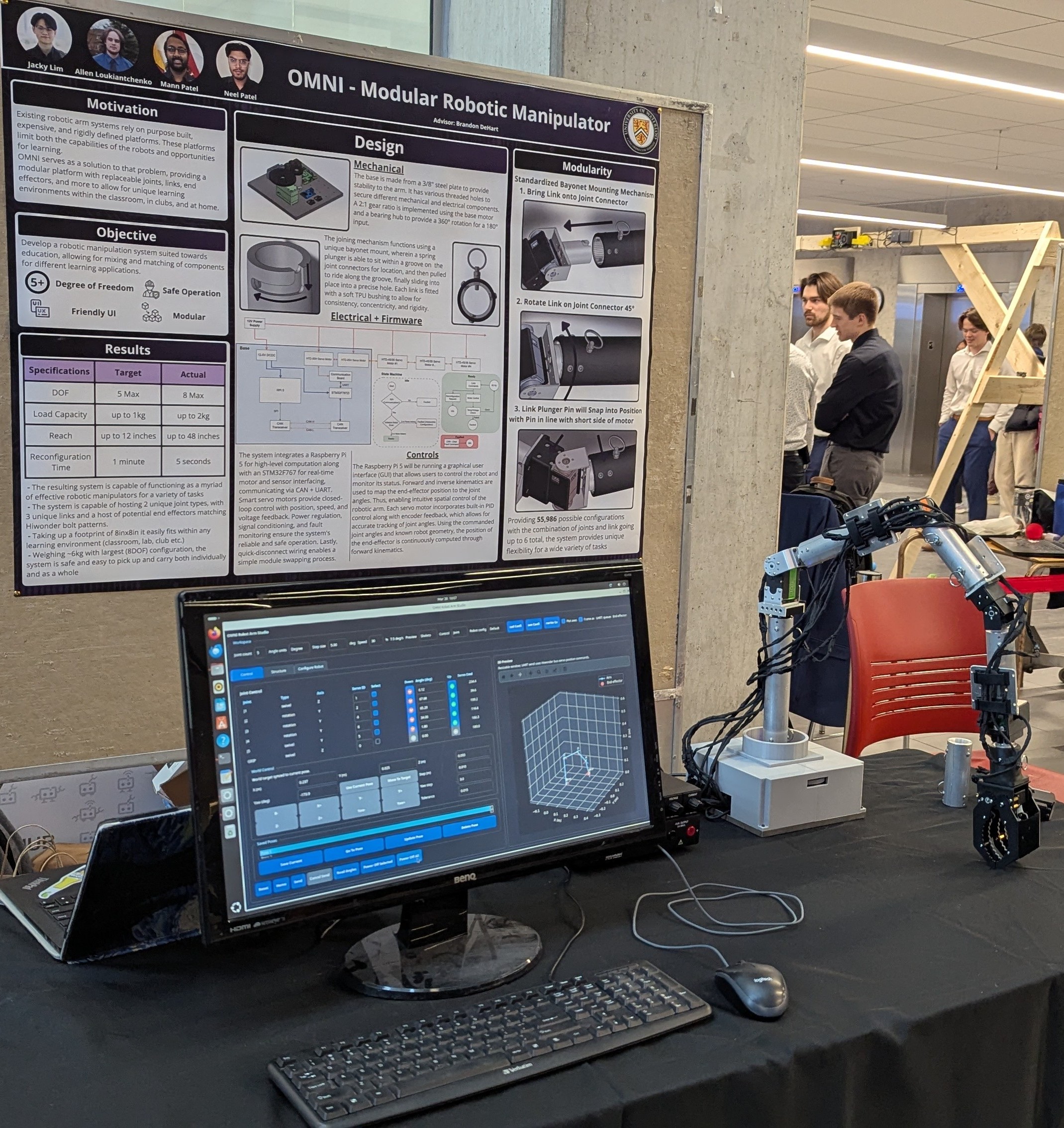
When designing the OMNI arm, the primary hurdle was creating a physical system that could be reconfigured on the fly without losing structural integrity and staying easy to use. Most educational robotic arms are rigid; OMNI needed to be modular.
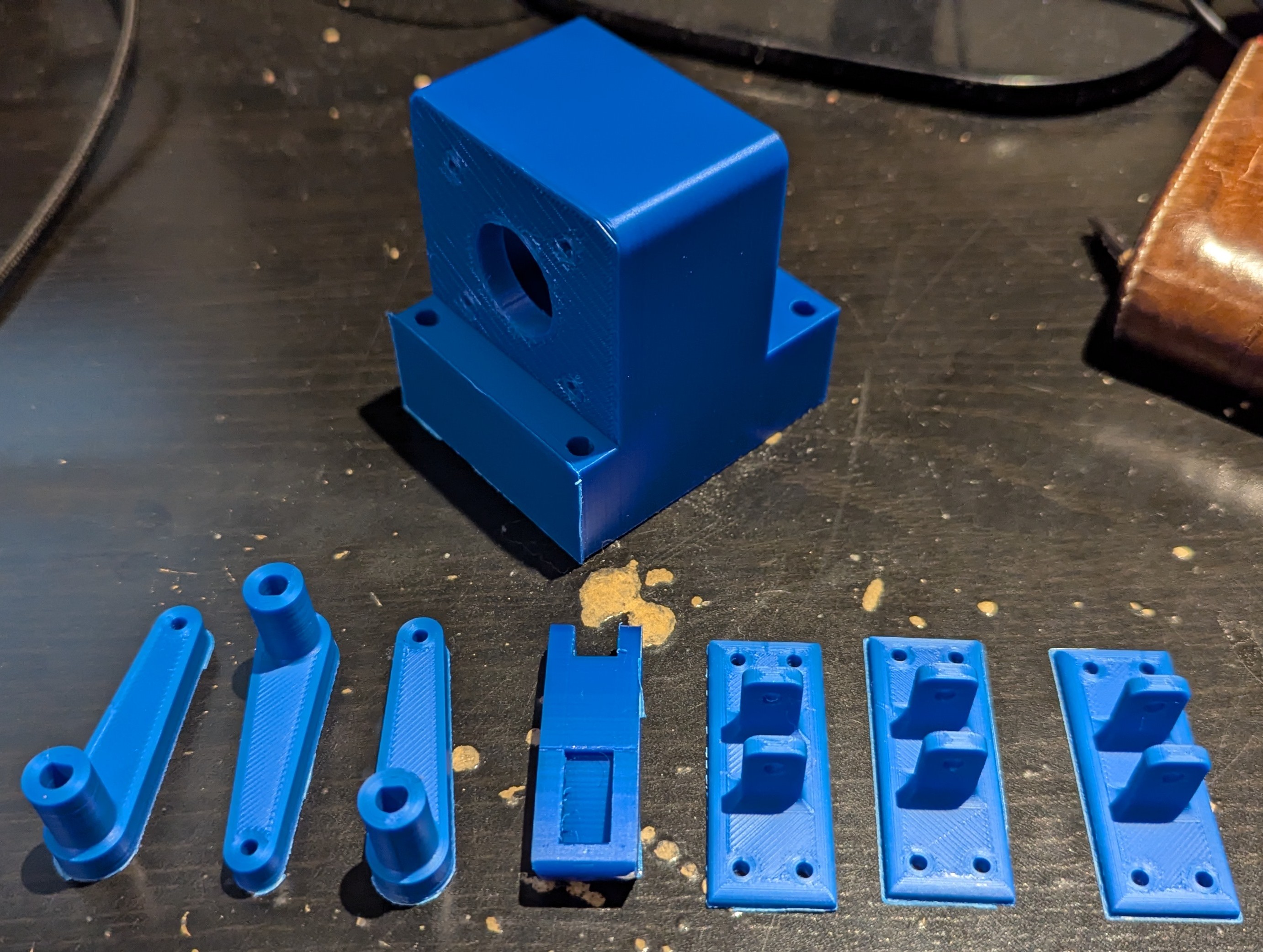
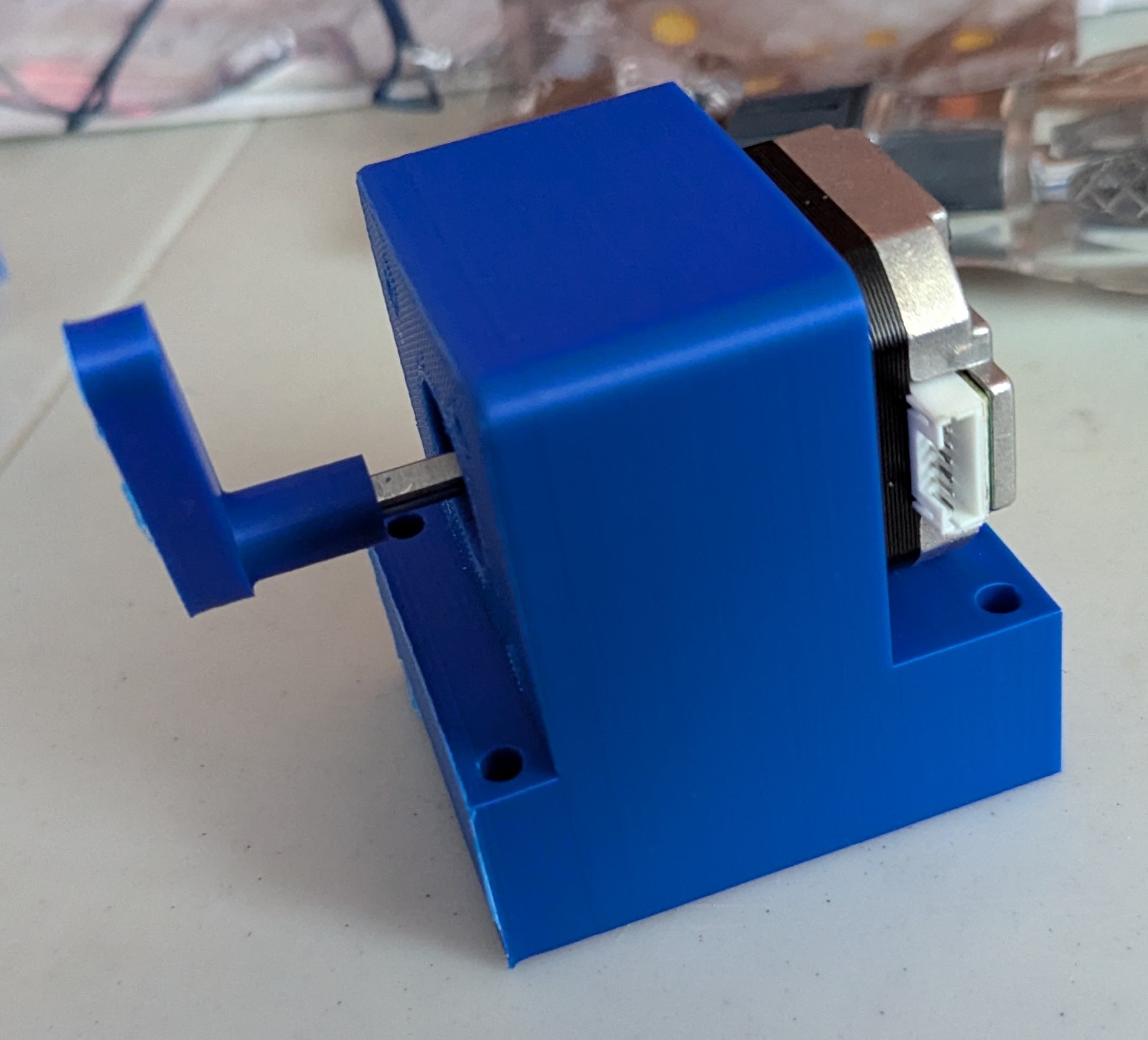
Mechanical Design & Materials
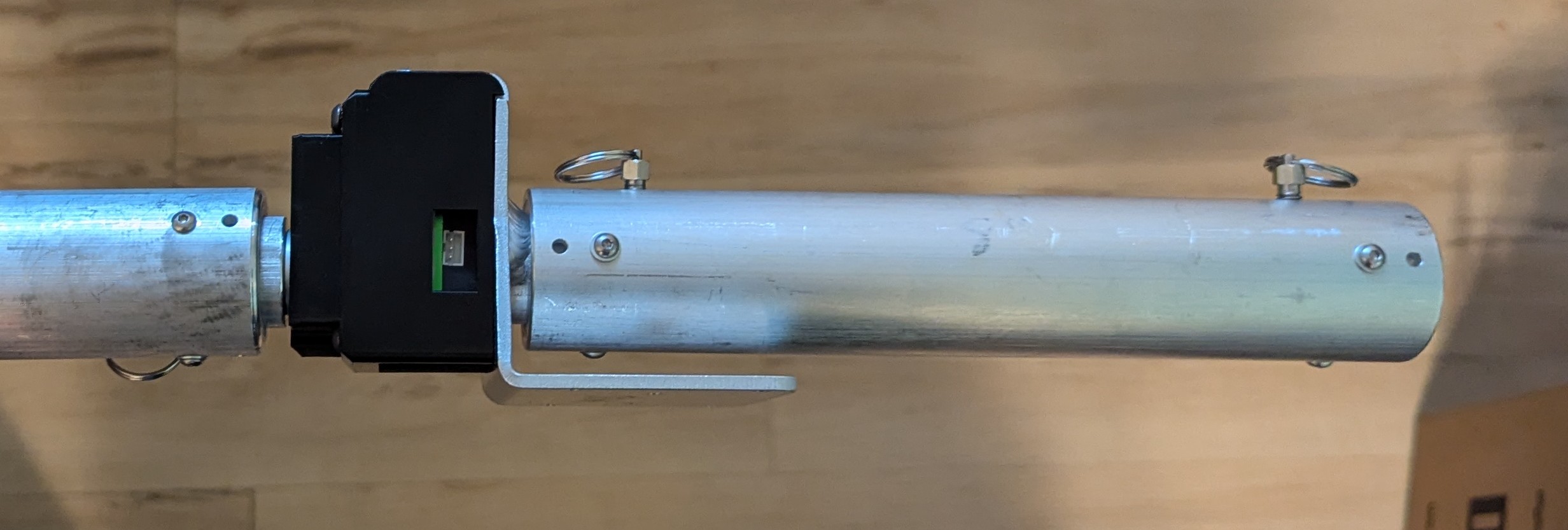
To solve this, I designed a unique bayonet mounting system. While steel was considered for the links, aluminum tubing was ultimately selected to reduce the moment of inertia and alleviate stress on the servo motors during rapid movements. To ensure smooth rotation without the cost of high-end bearings, I designed 3D-printed PETG bushings, which esnured concentricity, provided excellent wear resistance, and helped soften the effects of improper tolerance stackups from the machined parts.
Kinematics & Controls
The hardware is controlled via a combination of a Raspberry Pi and STM32 microcontrollers. A user needs to simply input the present configuration and the Pi does the rest, using a robust Inverse Kinematics algorithm, it can automatically calculate the necessary joint angles for any spatial coordinate, adapting instantly when physical links are added or removed.
Takeaways
The project was quite effective despite our significant time and budgetary constraints. That being said, there are lots of things I would change to further improve the design, so a 2nd Revision might look something like this:
- All/mostly plastic body to further reduce weight and lower cost of manufacturing
- Integrate custom made PCB's for each joint, saving space and cost on redundant microcontrollers as well as improve performance by allowing for unique ID's and more nuanced communication between joints
- A custom-made end effector adapter that allows for a wide variety of end effectors to be used without significant modifications required by the user
- Improved electrical connections, allowing for more seamless and reliable connection, preferably as part of the joint mating process rather than use cables